Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet
Accurate positioning is one of the main components and challenges for precision forestry. This study was established to test the feasibility of a low-cost GNSS receiver, u-blox ZED-F9P, in movable RTK mode with features that determine its positioning accuracy following logging trails in the forest environment. The accuracy of the low-cost receiver was controlled via a geodetic-grade receiver and high-density LiDAR data. The features of nearby logging trails were extracted from the LiDAR data in three main categories: tree characteristics; ground-surface conditions; and crown-surface conditions. An object-based TreeNet approach was used to explore the influential features of the receiver’s positioning accuracy.
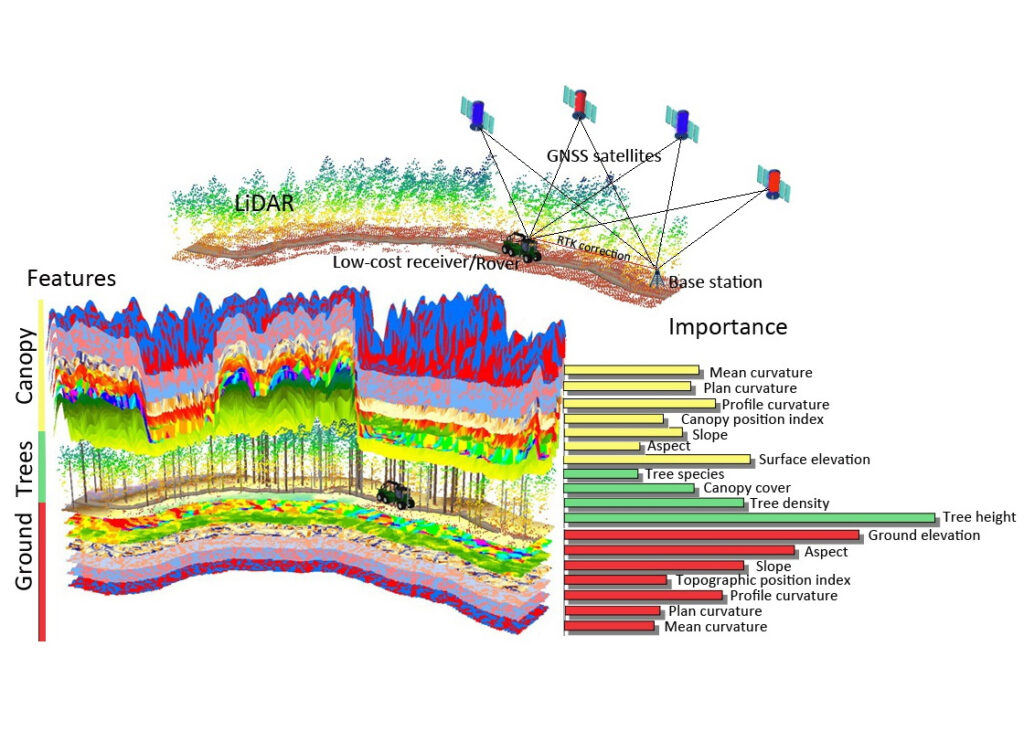
The results of the TreeNet model indicated that tree height, ground elevation, aspect, canopy-surface elevation, and tree density were the top influencing features. The partial dependence plots showed that tree height above 14 m, ground elevation above 134 m, western direction, canopy-surface elevation above 138 m, and tree density above 30% significantly increased positioning errors by the low-cost receiver over southern Finland. Overall, the low-cost receiver showed high performance in acquiring reliable and consistent positions, when integrated with LiDAR data. The system has a strong potential for navigating machinery in the pathway of precision harvesting in commercial forests.